

联系人:彭先生
手 机·:13728884272
电 话:0755-21070079
传 真:0755-21070079-808
邮 箱:412555222@qq.com
地 址:龙岗区龙岗街道南联社区圳埔岭路2号A栋3楼
网址: www.pinyizn.com
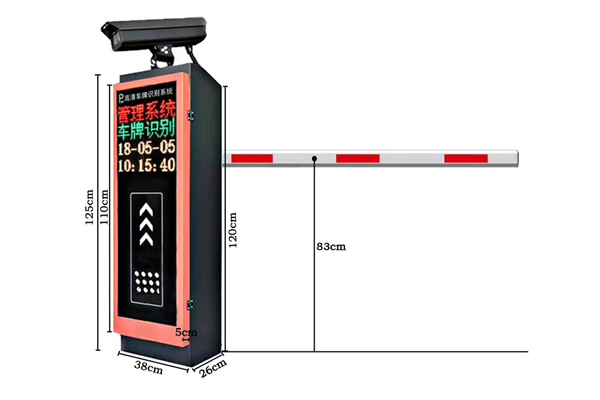
根据设计方案、现场情况确定设备摆放位置;(1).确定道闸及读卡设备摆放位置,确定道闸及读卡设备摆放位置时首先要确保车道的宽度,以便车辆出入顺畅,车道宽度一般不小于3米,4.5米左右为最佳;读卡设备距道闸距离一般为2.5米,最近不小于2米,主要是防止读卡时车头可能触到栏杆;.对于地下停车场,读卡设备应尽量摆放在比较水平的地面,否则车辆在上下坡时停车读卡会比较麻烦;对于地下停车场,道闸上方若有阻挡物则需选用折杆式道闸,阻挡物高度-1.2米即为折杆点位置;道闸及读卡设备的摆放位置直接关系到用户使用是否方便的问题,一但位置确定管线到位后,再要更改位置则会给施工带来很大的麻烦,因此对于在这方面工程经验不是很多的工程人员来说,先将道闸及读卡设备安装到位,然后模拟使用者,会同甲方人员一起看定位是否合适,最后再敷设管线。(2).确定自动出卡机安装位置,在有临时车辆出入的停车场,若选择了远距离读卡设备,同时又选择了自动出卡机,则自动出卡设备为一独立体,安装在读卡设备正前方距读卡设备约0.3米;若选择了普通读卡设备,同时又选择了自动出卡机,则自动出卡机同读卡机安装在同一设备内,现场施工不必考虑这一步骤;确定摄像机安装位置(若没有选择图像对比功能,则不需考虑此项),进出口摄像机的视角范围主要针对出入车辆在读卡时的车牌位置,一般选择自动光圈镜头,安装高度一般为2-2.5米;(3).确定岗厅的位置,对于没有临时车辆的停车场岗厅的位置视场地而定,或者根本就不设岗厅;
北京市交通委24日发布系列措施,提高道路车牌识别收费系统识别准确率。对车牌识别,优化了车牌颜色识别算法,改进了夜间因反光造成的识别问题,对遮挡摄像头的树木进行了修剪。对计费误差,通过电子收费系统与前端设备数据交换校验,降低了错误订单量;同时规范人工服务流程,防止出现不完整订单。对“审核时间长”的问题,增加了本地车牌信息自动匹配校验功能,效率显著提升。目前,本地车牌审核只需几小时,一次性审核通过率达90%以上。对停车费“过高”的问题,明确停车费执行标准是2011年4月1日由北京市发展改革委制定的,没有调整

人脸识别设备的优势在于其自然性和不被被测个体察觉的特点。所谓自然性,摆闸批发是指该识别方式同人类(甚至其他生物)进行个体识别时所利用的生物特征相同。例如人脸识别,人类也是通过观察比较人脸区分和确认身份的,另外具有自然性的识别还有虹膜识别语音识别、体形识别等,而指纹识别、虹膜识别等都不具有自然性,因为人类或者其他生物并不通过此类生物特征区别个体。不被察觉的特点对于一种识别方法也很重要,厦门摆闸这会使该人脸设备设备识别方法不令人反感,并且因为不容易引起人的注意而不容易被欺骗。人脸识别具有这方面的特点,它完全利用可见光获取人脸图像信息,而不同于指纹识别或者虹膜识别,需要利用电子压力传感器采集指纹,或者利用红外线采集虹膜图像,这些特殊的采集方式很容易被人察觉,从而更有可能被伪装欺骗。

无牌车检测算法需要检测不同背景条件下,不同光照条件下的,不同姿态的各种车型的车辆。在停车场出入口,一辆车过来,只输出一次结果,这样要求将车与车分开,目前可以通过跟踪或者背景建模完成这一部分。算法要求的实时性高,主要用在出入口,在保证效果的基础上,时间的控制才能给用户好的体验。品壹车牌识别系统,运用车型识别和车辆检测算法,解决无牌车管理的情况。车牌识别相机抓拍一张图片,通过车型识别算法,当是真正的没有牌照的汽车时,相机会先将其划分为车的队列,进而区分是有牌汽车还是无牌汽车;当是一辆三轮车等真正的无牌车时,相机通过车型识别算法,直接将其划分为非车队列。通过无牌车检测中的车与非车的判断,做好更准确更精细化的停车管理。

可见光人脸识别设备:在可见光环境下(太阳光、日光灯等照明光源),采集的人脸图像,进行人脸识别,适合在光线好的条件下应用。主动近红外人脸识别:在主动红外光源环境下(太阳光、日光灯等照明光源),采集的人脸图像,进行人脸识别。采用主动红外光源是为减弱环境光对人脸成像造成不利的影响(逆光、侧光、强光、弱光),红外主动光源位于不可见波段,不会伤害人的眼睛,而中/远红外波段成像会损失物体表面大多数信息,所以近红外是好的选择。由于近红外无法在中、远距离采集人脸图像,并且要求底库的人脸图像也是近红外模式下采集的照片,因此其存在比较大的应用局限性,目前主要用于人脸考勤、门禁。在现阶段的实际应用中,可见光的人脸识别的应用更加广泛。


